SISTEMAS DE CONTROLE II
Considere o processo a controlar:
 cujas variáveis de estado não são acessíveis.
Marque a alternativa que mostre as matrizes A, B, C e D na forma canônica observável.
cujas variáveis de estado não são acessíveis.
Marque a alternativa que mostre as matrizes A, B, C e D na forma canônica observável.





A entrada ou controle do sistema (matriz u) é o conjunto de variáveis que podem influir no estado. No nosso aquecedor, são três:
Temperatura de saída da água (qout), Temperatura desejada pelo usuário (qtgt), e a potência do aquecedor (W) em kcal/min.
Temperatura de entrada da água (qin), Temperatura desejada pelo usuário (qtgt), e a potência do resfriador (W) em kcal/min.
Temperatura de entrada da água (qin), Temperatura desejada pelo usuário (qtgt), e a potência do aquecedor (W) em kcal/min.
Temperatura de saída da água (qout), Temperatura desejada pelo usuário (qtgt), e a potência do resfriador (W) em kcal/min.
Temperatura de saída da água (qout), Temperatura realizada pelo usuário (qtgt), e a potência do resfriador (W) em kcal/min.
Embora o controle PID (Proporcional, Integral, Derivativo) seja muito usado em regulação, eles não são adequados para o seguimento de trajetórias, devido às características dinâmicas dos manipuladores, com grande grau de acoplamento e não linearidades. Para viabilizar o uso de PID nesses casos, deve-se empregá-lo como parte de controladores baseados em modelo.
Assinale a alternativa que contém apenas técnicas baseadas no modelo dinâmico.
Linearização por realimentação, Controle por lógica fuzzy, Controle baseado em passividade.
Compensação por alimentação direta, Controle por lógica fuzzy, Controle baseado em passividade.
Compensação por alimentação direta, Controle por dinâmica direta, Controle por modos deslizantes.
Linearização por realimentação, Controle por dinâmica inversa, Controle baseado em passividade.
Compensação por alimentação direta, Controle por lógica fuzzy, Controle baseado em passividade.
O diagrama da figura abaixo apresenta um sistema com dois integradores ideais, sendo os blocos com as grandezas a1, a2 e b, amplificadores com ganhos constantes.
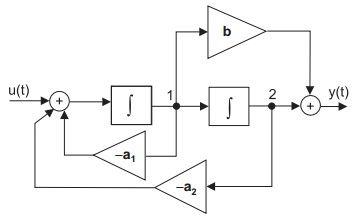 Considere que x1 (t ) é o sinal no ponto 1, que x2 (t ) é o sinal no ponto 2 do diagrama e que
Considere que x1 (t ) é o sinal no ponto 1, que x2 (t ) é o sinal no ponto 2 do diagrama e que %7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D "x(t)=[[x_(1)(t)],[x_(2)(t)]]") é o vetor de estados. A matriz da dinâmica A e o vetor de saída C, da representação em espaço de estado deste sistema, respectivamente, são:
é o vetor de estados. A matriz da dinâmica A e o vetor de saída C, da representação em espaço de estado deste sistema, respectivamente, são:
,-a_(1)]]") e
e 
,1],[-a_(2),0]]") e
e 
,-a_(2)],[0,1]]") e
e 
,-a_(2)],[1,0]]") e
e 
e
Considere o sistema dado por:
%7D%7D%7D%7B%7B%7BU%7D%7B%5Cleft(%7Bs%7D%5Cright)%7D%7D%7D%3D%5Cfrac%7B%7B%7Bs%7D%2B%7B3%7D%7D%7D%7B%7B%7B%7Bs%7D%7D%5E%7B%7B2%7D%7D%2B%7B3%7D%7Bs%7D%2B%7B2%7D%7D%7D "(Y(s))/(U(s))=(s+3)/(s^2+3s+2)") Assinale a alternativa que representa no espaço de estados a forma canônica observável.
Assinale a alternativa que representa no espaço de estados a forma canônica observável.
%7D%5C%5C%7B%5Cdot%7B%7Bx%7D%7D%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%3D%7B%5Cleft%5B%5Cmatrix%7B-%7B2%7D%26%7B0%7D%5C%5C%7B1%7D%26-%7B3%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%2B%7B%5Cleft%5B%5Cmatrix%7B%7B3%7D%5C%5C%7B1%7D%7D%5Cright%5D%7D%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "[[dotx_(1)(t)],[dotx_(2)(t)]]=[[-2,0],[1,-3]][[x_(1)(t)],[x_(2)(t)]]+[[3],[1]]u(t)")
%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B1%7D%26%7B0%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D "y(t)=[[1,0]][[x_(1)(t)],[x_(2)(t)]]")
%7D%5C%5C%7B%5Cdot%7B%7Bx%7D%7D%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%3D%7B%5Cleft%5B%5Cmatrix%7B-%7B2%7D%26%7B0%7D%5C%5C-%7B3%7D%26%7B1%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%2B%7B%5Cleft%5B%5Cmatrix%7B%7B3%7D%5C%5C%7B1%7D%7D%5Cright%5D%7D%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "[[dotx_(1)(t)],[dotx_(2)(t)]]=[[-2,0],[-3,1]][[x_(1)(t)],[x_(2)(t)]]+[[3],[1]]u(t)")
%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%26%7B1%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D "y(t)=[[0,1]][[x_(1)(t)],[x_(2)(t)]]")
%7D%5C%5C%7B%5Cdot%7B%7Bx%7D%7D%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%26-%7B2%7D%5C%5C-%7B1%7D%26%7B3%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%2B%7B%5Cleft%5B%5Cmatrix%7B%7B1%7D%5C%5C%7B3%7D%7D%5Cright%5D%7D%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "[[dotx_(1)(t)],[dotx_(2)(t)]]=[[0,-2],[-1,3]][[x_(1)(t)],[x_(2)(t)]]+[[1],[3]]u(t)")
%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%26%7B3%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D "y(t)=[[0,3]][[x_(1)(t)],[x_(2)(t)]]")
%7D%5C%5C%7B%5Cdot%7B%7Bx%7D%7D%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%26%7B1%7D%5C%5C-%7B2%7D%26-%7B3%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%2B%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%5C%5C%7B1%7D%7D%5Cright%5D%7D%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "[[dotx_(1)(t)],[dotx_(2)(t)]]=[[0,1],[-2,-3]][[x_(1)(t)],[x_(2)(t)]]+[[0],[1]]u(t)")
%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B3%7D%26%7B1%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D "y(t)=[[3,1]][[x_(1)(t)],[x_(2)(t)]]")
%7D%5C%5C%7B%5Cdot%7B%7Bx%7D%7D%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%3D%7B%5Cleft%5B%5Cmatrix%7B%7B0%7D%26-%7B2%7D%5C%5C%7B1%7D%26-%7B3%7D%7D%5Cright%5D%7D%7B%5Cleft%5B%5Cmatrix%7B%7Bx%7D_%7B%7B%7B1%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%5C%5C%7Bx%7D_%7B%7B%7B2%7D%7D%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D%7D%5Cright%5D%7D%2B%7B%5Cleft%5B%5Cmatrix%7B%7B3%7D%5C%5C%7B1%7D%7D%5Cright%5D%7D%7Bu%7D%7B%5Cleft(%7Bt%7D%5Cright)%7D "[[dotx_(1)(t)],[dotx_(2)(t)]]=[[0,-2],[1,-3]][[x_(1)(t)],[x_(2)(t)]]+[[3],[1]]u(t)")
A respeito da comparação entre compensação por avanço de fase (lead), atraso de fase (lag) e atraso e avanço de fase (lead-lag), julgue os itens a seguir e marque V para verdadeira e F para falsa.
( ) . A compensação por avanço de fase atinge o resultado desejado pelos méritos de sua contribuição de avanço de fase, enquanto a compensação por atraso de fase alcança o resultado pelos méritos de sua propriedade de atenuação nas altas frequências.
( ) . A compensação por avanço de fase é comumente utilizada para melhorar as margens de estabilidade; ela fornece uma frequência de cruzamento de ganho maior do que é possível com a compensação por atraso de fase.
( ) . A compensação por avanço de fase requer um aumento adicional no ganho para compensar a atenuação inerente à rede por avanço de fase.
( ) . A compensação por avanço de fase pode gerar sinais de maior amplitude no sistema. Esses sinais maiores não são desejáveis, pois podem causar saturação no sistema.
( ) . A compensação por atraso de fase reduz o ganho do sistema nas altas frequências sem reduzir o ganho em baixas frequências.
( ) . A compensação por atraso de fase introduz um par de polo zero próximo à origem que vai gerar uma longa cauda de pequena amplitude na resposta transitória.
A alternativa que contem a sequência correta é:
F, V, F, V, F, V
V, F, V, F, V, F
F, F, V, V, F, F
V, V, F, F, V, V
V, V, V, V, V, V
Um sistema de controle cuja a função de transferência é dada abaixo, possui:
/(s^3+2s^2+5)")
Dois zeros: -2 e -4.
Dois polos: j2 e j4
Dois polos: (j2 + 3i) e (j2 + 3i)
Dois zeros: (j1 + 2i) e (j1 + 2i)
Dois zeros: 5 e 8
Dada a função de transferência abaixo, determine a sua constante de amortecimento.

A entrada ou controle do sistema (matriz u) é o conjunto de variáveis que podem influir no estado. No nosso aquecedor, são três:
Temperatura de saída da água (qout), Temperatura desejada pelo usuário (qtgt), e a potência do aquecedor (W) em kcal/min.
Temperatura de entrada da água (qin), Temperatura desejada pelo usuário (qtgt), e a potência do resfriador (W) em kcal/min.
Temperatura de entrada da água (qin), Temperatura desejada pelo usuário (qtgt), e a potência do aquecedor (W) em kcal/min.
Temperatura de saída da água (qout), Temperatura desejada pelo usuário (qtgt), e a potência do resfriador (W) em kcal/min.
Temperatura de saída da água (qout), Temperatura realizada pelo usuário (qtgt), e a potência do resfriador (W) em kcal/min.
Embora o controle PID (Proporcional, Integral, Derivativo) seja muito usado em regulação, eles não são adequados para o seguimento de trajetórias, devido às características dinâmicas dos manipuladores, com grande grau de acoplamento e não linearidades. Para viabilizar o uso de PID nesses casos, deve-se empregá-lo como parte de controladores baseados em modelo.
Assinale a alternativa que contém apenas técnicas baseadas no modelo dinâmico.
Linearização por realimentação, Controle por lógica fuzzy, Controle baseado em passividade.
Compensação por alimentação direta, Controle por lógica fuzzy, Controle baseado em passividade.
Compensação por alimentação direta, Controle por dinâmica direta, Controle por modos deslizantes.
Linearização por realimentação, Controle por dinâmica inversa, Controle baseado em passividade.
Compensação por alimentação direta, Controle por lógica fuzzy, Controle baseado em passividade.
O diagrama da figura abaixo apresenta um sistema com dois integradores ideais, sendo os blocos com as grandezas a1, a2 e b, amplificadores com ganhos constantes.
Considere que x1 (t ) é o sinal no ponto 1, que x2 (t ) é o sinal no ponto 2 do diagrama e que é o vetor de estados. A matriz da dinâmica A e o vetor de saída C, da representação em espaço de estado deste sistema, respectivamente, são:
e
e
e
e
e
Considere o sistema dado por:
Assinale a alternativa que representa no espaço de estados a forma canônica observável.
A respeito da comparação entre compensação por avanço de fase (lead), atraso de fase (lag) e atraso e avanço de fase (lead-lag), julgue os itens a seguir e marque V para verdadeira e F para falsa.
( ) . A compensação por avanço de fase atinge o resultado desejado pelos méritos de sua contribuição de avanço de fase, enquanto a compensação por atraso de fase alcança o resultado pelos méritos de sua propriedade de atenuação nas altas frequências.
( ) . A compensação por avanço de fase é comumente utilizada para melhorar as margens de estabilidade; ela fornece uma frequência de cruzamento de ganho maior do que é possível com a compensação por atraso de fase.
( ) . A compensação por avanço de fase requer um aumento adicional no ganho para compensar a atenuação inerente à rede por avanço de fase.
( ) . A compensação por avanço de fase pode gerar sinais de maior amplitude no sistema. Esses sinais maiores não são desejáveis, pois podem causar saturação no sistema.
( ) . A compensação por atraso de fase reduz o ganho do sistema nas altas frequências sem reduzir o ganho em baixas frequências.
( ) . A compensação por atraso de fase introduz um par de polo zero próximo à origem que vai gerar uma longa cauda de pequena amplitude na resposta transitória.
A alternativa que contem a sequência correta é:
F, V, F, V, F, V
V, F, V, F, V, F
F, F, V, V, F, F
V, V, F, F, V, V
V, V, V, V, V, V
Um sistema de controle cuja a função de transferência é dada abaixo, possui:
Dois zeros: -2 e -4.
Dois polos: j2 e j4
Dois polos: (j2 + 3i) e (j2 + 3i)
Dois zeros: (j1 + 2i) e (j1 + 2i)
Dois zeros: 5 e 8
Dada a função de transferência abaixo, determine a sua constante de amortecimento.
Temperatura de saída da água (qout), Temperatura desejada pelo usuário (qtgt), e a potência do aquecedor (W) em kcal/min.
Temperatura de entrada da água (qin), Temperatura desejada pelo usuário (qtgt), e a potência do resfriador (W) em kcal/min.
Temperatura de entrada da água (qin), Temperatura desejada pelo usuário (qtgt), e a potência do aquecedor (W) em kcal/min.
Temperatura de saída da água (qout), Temperatura desejada pelo usuário (qtgt), e a potência do resfriador (W) em kcal/min.
Temperatura de saída da água (qout), Temperatura realizada pelo usuário (qtgt), e a potência do resfriador (W) em kcal/min.
Embora o controle PID (Proporcional, Integral, Derivativo) seja muito usado em regulação, eles não são adequados para o seguimento de trajetórias, devido às características dinâmicas dos manipuladores, com grande grau de acoplamento e não linearidades. Para viabilizar o uso de PID nesses casos, deve-se empregá-lo como parte de controladores baseados em modelo.
Assinale a alternativa que contém apenas técnicas baseadas no modelo dinâmico.
Linearização por realimentação, Controle por lógica fuzzy, Controle baseado em passividade.
Compensação por alimentação direta, Controle por lógica fuzzy, Controle baseado em passividade.
Compensação por alimentação direta, Controle por dinâmica direta, Controle por modos deslizantes.
Linearização por realimentação, Controle por dinâmica inversa, Controle baseado em passividade.
Compensação por alimentação direta, Controle por lógica fuzzy, Controle baseado em passividade.
O diagrama da figura abaixo apresenta um sistema com dois integradores ideais, sendo os blocos com as grandezas a1, a2 e b, amplificadores com ganhos constantes.
Considere que x1 (t ) é o sinal no ponto 1, que x2 (t ) é o sinal no ponto 2 do diagrama e que é o vetor de estados. A matriz da dinâmica A e o vetor de saída C, da representação em espaço de estado deste sistema, respectivamente, são:
e
e
e
e
e
Considere o sistema dado por:
Assinale a alternativa que representa no espaço de estados a forma canônica observável.
A respeito da comparação entre compensação por avanço de fase (lead), atraso de fase (lag) e atraso e avanço de fase (lead-lag), julgue os itens a seguir e marque V para verdadeira e F para falsa.
( ) . A compensação por avanço de fase atinge o resultado desejado pelos méritos de sua contribuição de avanço de fase, enquanto a compensação por atraso de fase alcança o resultado pelos méritos de sua propriedade de atenuação nas altas frequências.
( ) . A compensação por avanço de fase é comumente utilizada para melhorar as margens de estabilidade; ela fornece uma frequência de cruzamento de ganho maior do que é possível com a compensação por atraso de fase.
( ) . A compensação por avanço de fase requer um aumento adicional no ganho para compensar a atenuação inerente à rede por avanço de fase.
( ) . A compensação por avanço de fase pode gerar sinais de maior amplitude no sistema. Esses sinais maiores não são desejáveis, pois podem causar saturação no sistema.
( ) . A compensação por atraso de fase reduz o ganho do sistema nas altas frequências sem reduzir o ganho em baixas frequências.
( ) . A compensação por atraso de fase introduz um par de polo zero próximo à origem que vai gerar uma longa cauda de pequena amplitude na resposta transitória.
A alternativa que contem a sequência correta é:
F, V, F, V, F, V
V, F, V, F, V, F
F, F, V, V, F, F
V, V, F, F, V, V
V, V, V, V, V, V
Um sistema de controle cuja a função de transferência é dada abaixo, possui:
Dois zeros: -2 e -4.
Dois polos: j2 e j4
Dois polos: (j2 + 3i) e (j2 + 3i)
Dois zeros: (j1 + 2i) e (j1 + 2i)
Dois zeros: 5 e 8
Dada a função de transferência abaixo, determine a sua constante de amortecimento.
Linearização por realimentação, Controle por lógica fuzzy, Controle baseado em passividade.
Compensação por alimentação direta, Controle por lógica fuzzy, Controle baseado em passividade.
Compensação por alimentação direta, Controle por dinâmica direta, Controle por modos deslizantes.
Linearização por realimentação, Controle por dinâmica inversa, Controle baseado em passividade.
Compensação por alimentação direta, Controle por lógica fuzzy, Controle baseado em passividade.
O diagrama da figura abaixo apresenta um sistema com dois integradores ideais, sendo os blocos com as grandezas a1, a2 e b, amplificadores com ganhos constantes.
Considere que x1 (t ) é o sinal no ponto 1, que x2 (t ) é o sinal no ponto 2 do diagrama e que é o vetor de estados. A matriz da dinâmica A e o vetor de saída C, da representação em espaço de estado deste sistema, respectivamente, são:
e
e
e
e
e
Considere o sistema dado por:
Assinale a alternativa que representa no espaço de estados a forma canônica observável.
A respeito da comparação entre compensação por avanço de fase (lead), atraso de fase (lag) e atraso e avanço de fase (lead-lag), julgue os itens a seguir e marque V para verdadeira e F para falsa.
( ) . A compensação por avanço de fase atinge o resultado desejado pelos méritos de sua contribuição de avanço de fase, enquanto a compensação por atraso de fase alcança o resultado pelos méritos de sua propriedade de atenuação nas altas frequências.
( ) . A compensação por avanço de fase é comumente utilizada para melhorar as margens de estabilidade; ela fornece uma frequência de cruzamento de ganho maior do que é possível com a compensação por atraso de fase.
( ) . A compensação por avanço de fase requer um aumento adicional no ganho para compensar a atenuação inerente à rede por avanço de fase.
( ) . A compensação por avanço de fase pode gerar sinais de maior amplitude no sistema. Esses sinais maiores não são desejáveis, pois podem causar saturação no sistema.
( ) . A compensação por atraso de fase reduz o ganho do sistema nas altas frequências sem reduzir o ganho em baixas frequências.
( ) . A compensação por atraso de fase introduz um par de polo zero próximo à origem que vai gerar uma longa cauda de pequena amplitude na resposta transitória.
A alternativa que contem a sequência correta é:
F, V, F, V, F, V
V, F, V, F, V, F
F, F, V, V, F, F
V, V, F, F, V, V
V, V, V, V, V, V
Um sistema de controle cuja a função de transferência é dada abaixo, possui:
Dois zeros: -2 e -4.
Dois polos: j2 e j4
Dois polos: (j2 + 3i) e (j2 + 3i)
Dois zeros: (j1 + 2i) e (j1 + 2i)
Dois zeros: 5 e 8
Dada a função de transferência abaixo, determine a sua constante de amortecimento.
Considere o sistema dado por:
Assinale a alternativa que representa no espaço de estados a forma canônica observável.
A respeito da comparação entre compensação por avanço de fase (lead), atraso de fase (lag) e atraso e avanço de fase (lead-lag), julgue os itens a seguir e marque V para verdadeira e F para falsa.
( ) . A compensação por avanço de fase atinge o resultado desejado pelos méritos de sua contribuição de avanço de fase, enquanto a compensação por atraso de fase alcança o resultado pelos méritos de sua propriedade de atenuação nas altas frequências.
( ) . A compensação por avanço de fase é comumente utilizada para melhorar as margens de estabilidade; ela fornece uma frequência de cruzamento de ganho maior do que é possível com a compensação por atraso de fase.
( ) . A compensação por avanço de fase requer um aumento adicional no ganho para compensar a atenuação inerente à rede por avanço de fase.
( ) . A compensação por avanço de fase pode gerar sinais de maior amplitude no sistema. Esses sinais maiores não são desejáveis, pois podem causar saturação no sistema.
( ) . A compensação por atraso de fase reduz o ganho do sistema nas altas frequências sem reduzir o ganho em baixas frequências.
( ) . A compensação por atraso de fase introduz um par de polo zero próximo à origem que vai gerar uma longa cauda de pequena amplitude na resposta transitória.
A alternativa que contem a sequência correta é:
F, V, F, V, F, V
V, F, V, F, V, F
F, F, V, V, F, F
V, V, F, F, V, V
V, V, V, V, V, V
Um sistema de controle cuja a função de transferência é dada abaixo, possui:
Dois zeros: -2 e -4.
Dois polos: j2 e j4
Dois polos: (j2 + 3i) e (j2 + 3i)
Dois zeros: (j1 + 2i) e (j1 + 2i)
Dois zeros: 5 e 8
Dada a função de transferência abaixo, determine a sua constante de amortecimento.
A respeito da comparação entre compensação por avanço de fase (lead), atraso de fase (lag) e atraso e avanço de fase (lead-lag), julgue os itens a seguir e marque V para verdadeira e F para falsa.
( ) . A compensação por avanço de fase atinge o resultado desejado pelos méritos de sua contribuição de avanço de fase, enquanto a compensação por atraso de fase alcança o resultado pelos méritos de sua propriedade de atenuação nas altas frequências.
( ) . A compensação por avanço de fase é comumente utilizada para melhorar as margens de estabilidade; ela fornece uma frequência de cruzamento de ganho maior do que é possível com a compensação por atraso de fase.
( ) . A compensação por avanço de fase requer um aumento adicional no ganho para compensar a atenuação inerente à rede por avanço de fase.
( ) . A compensação por avanço de fase pode gerar sinais de maior amplitude no sistema. Esses sinais maiores não são desejáveis, pois podem causar saturação no sistema.
( ) . A compensação por atraso de fase reduz o ganho do sistema nas altas frequências sem reduzir o ganho em baixas frequências.
( ) . A compensação por atraso de fase introduz um par de polo zero próximo à origem que vai gerar uma longa cauda de pequena amplitude na resposta transitória.
A alternativa que contem a sequência correta é:
F, V, F, V, F, V
V, F, V, F, V, F
F, F, V, V, F, F
V, V, F, F, V, V
V, V, V, V, V, V
Um sistema de controle cuja a função de transferência é dada abaixo, possui:
Dois zeros: -2 e -4.
Dois polos: j2 e j4
Dois polos: (j2 + 3i) e (j2 + 3i)
Dois zeros: (j1 + 2i) e (j1 + 2i)
Dois zeros: 5 e 8
Dada a função de transferência abaixo, determine a sua constante de amortecimento.
F, V, F, V, F, V
V, F, V, F, V, F
F, F, V, V, F, F
V, V, F, F, V, V
V, V, V, V, V, V
Um sistema de controle cuja a função de transferência é dada abaixo, possui:
Dois zeros: -2 e -4.
Dois polos: j2 e j4
Dois polos: (j2 + 3i) e (j2 + 3i)
Dois zeros: (j1 + 2i) e (j1 + 2i)
Dois zeros: 5 e 8
Dada a função de transferência abaixo, determine a sua constante de amortecimento.
Dois zeros: -2 e -4.
Dois polos: j2 e j4
Dois polos: (j2 + 3i) e (j2 + 3i)
Dois zeros: (j1 + 2i) e (j1 + 2i)
Dois zeros: 5 e 8